
Контрольные работы по математике 2 класс
Контрольные работы по математике во 2 классе
по программе М.И. Моро, М.А. Бантовой
Входная контрольная
работа № 1 по теме
«Повторение изученного в 1 классе».
Вариант 1.
Реши задачу:
У Оли в букете 5 кленовых листьев, а осиновых на 6 больше. Сколько осиновых листьев в букете у Оли?
Вычисли:
5 + 4 = 7 + 4 = 14 — 8 = 5 – 0 =
3 + 2 = 8 + 3 = 12 – 9 = 7 – 4 =
10 – 7 = 9 + 8 = 16 – 7 = 6 – 3 =
Сравни, вставь вместо звёздочек знаки «», «», или «=».
8 * 9 6 – 4 * 8 1дм 7см *17 см
5 * 10 9 + 1 * 10 2 дм * 2см
Начерти два отрезка. Один длиной 6 сантиметров, другой на 2 сантиметра меньше.

5*. Придумай и запиши два числа, при сложении которых в результате получится 1.
Вариант 2.
Реши задачу:
Из сада принесли 7 стаканов малины, а смородины на 4 стакана больше. Сколько стаканов смородины принесли из сада?
Вычисли:
10 — 3 = 7 + 8 = 11– 3 = 5 – 4 =
6 + 5 = 2 + 9 = 14– 7 = 9 – 1 =
4 + 4 = 15 — 7 = 13 – 8 = 7 – 3 =
Сравни, вставь вместо звёздочек знаки «», «», или «=».
* 5 8 – 4 * 3 14 см * 1 дм 5 см
10 * 9 5 * 10 – 5 20 см * 2 дм
Начерти два отрезка. Один длиной 6 сантиметров, другой на 2 сантиметра больше.
5*. Придумай и запиши два числа, при сложении которых в результате получится 2.
Контрольная работа № 2 по теме «Нумерация чисел от 1 до 100».
Вариант 1.
1. Реши задачу:
На одной грядке 20 кустов клубники, а на другой на 5 кустов больше. Сколько кустов клубники на двух грядках?
2. Реши примеры:
60 + 5 = 75 — 70 = 56 – 50 + 4 =
46 – 6 = 60 – 20 = 13 – 7 + 60=
3. Сравни, вставь вместо звёздочек знаки «», «», или «=».
8 м * 7 дм 1 м * 98 см
м * 4 см 53 мм * 5 см
4 . Представь числа в виде суммы разрядных слагаемых
56 = +
49 = +
Начертите два отрезка: один длиной 40 мм, а другой на 20 мм длиннее.
Вариант 2.
1. Реши задачу:
В саду 30 кустов смородины, а крыжовника на 2 куста больше. Сколько всего ягодных кустов в саду?
2. Реши примеры:
6 + 40 = 57 – 7 = 11 – 7 + 40 =
78 – 70 = 60 – 40 = 34 – 30 + 7=
3. Сравни, вставь вместо звёздочек знаки «», «», или «=».
6 м * 9 дм 1 м * 92 см
13 мм * 2 см 68 мм * 6 см
4 . Представь числа в виде суммы разрядных слагаемых
78 = +
94 = +
5. Начертите два отрезка: один длиной 60 мм, а другой на 30 мм короче.
Контрольная работа № 3 по теме «Сложение и вычитание»
Вариант 1.
Реши задачу:
На стоянке такси стояло 12 автомашин. После того, как несколько машин уехало, осталось 5 автомашин. Сколько автомашин уехало?
Найди значения выражений:
6 + 7 – 9 = 15 – (3 + 5) =
10 + 3 – 4 = 8 + (12 – 5) =
18 – 10 + 5 = 9 + (13 – 7) =
Сравни, вставь вместо звёздочек знаки «», «», или «=».
4 см 2 мм … 24 мм 1 м … 100 см
7 + 4 … 19 59 мин … 1 ч
Начерти прямоугольник : длина 5 см, ширина 3 см. Вычисли периметр прямоугольника.
5. Из чисел: 48, 1, 14, 4, 40, 81, 8, 18, 84, 44, 80, 88 — выпиши все двузначные числа в порядке возрастания.
Из чисел: 48, 1, 14, 4, 40, 81, 8, 18, 84, 44, 80, 88 — выпиши все двузначные числа в порядке возрастания.
Вариант 2.
Реши задачу:
Рыболовы поймали несколько окуней. Из 9 окуней они сварили уху, и у них осталось ещё 7 окуней. Сколько всего окуней поймали рыболовы?
Найди значения выражений:
5 + 8 – 9 = 14 – (2 + 5) =
10 + 5 – 6 = 4 + (16 – 8) =
19 – 10 + 7 = 9 + (18 – 10) =
Сравни, вставь вместо звёздочек знаки «», «», или «=».
3 дм 2 см * 23 см 1 см * 10 мм
8 + 5 * 14 1 ч. * 30 мин
Начерти квадрат, длина стороны которого 4 см. Вычисли периметр квадрата.
Из чисел: 62, 12, 6, 66, 20, 26, 2, 21, 16, 22, 60, 6 выпиши все двузначные числа в порядке возрастания.
Вариант 1
Реши задачу.
Маша использовала для поделок 7 шишек, а желудей – на 5 больше. Сколько шишек и желудей использовала Маша?
Найди значения выражений:
50 – 21 = 60 – 20 = 32 + 8 =
45 – 20 = 29 – 2 = 79 – (30 + 10) =
47 + 2 = 87 + 3 = 54 + (13 – 7) =
Сравни:
10 см … 1 м 56 см … 6 дм 5 см
Вставь вместо звёздочек знаки «+» или «-», чтобы записи были верными:
36 * 4 * 8 = 32 23 * 40 * 7 = 70
5*. Вставь в «окошки» числа так, чтобы
равенство сохранилось;
знак равенства изменился на знак «».
52 + … = 52 + …
Сделай две записи.
Вариант 2
Реши задачу.
Лена очистила 13 картофелин, а её сестра на 6 картофелин меньше. Сколько картофелин очистили обе девочки?
Найди значения выражений:
60 – 23 = 70 – 30 = 46 + 4 =
63 – 20 = 40 – 9 = 63 – (15 + 8) =
56 + 3 = 95 + 5 = 48 + (10 – 20) =
Сравни:
10 дм … 1 м 89 см … 9 дм 8 см
Вставь вместо звёздочек знаки «+» или «-», чтобы записи были верными:
23 * 7 * 5 = 25 18 * 50 * 8 = 60
5*. Вставь в «окошки» числа так, чтобы
Вставь в «окошки» числа так, чтобы
равенство сохранилось;
знак равенства изменился на знак «».
41 + … = 41 + …
Сделай две записи.
Контрольная работа № 5 за 1 полугодие
Вариант 1.
Вычисли.
57 – 7 = 40 + 17 = 38 – 9 =
93 – 90 = 76 – 4 = 50 – 23 =
61 + 30 = 39 + 7 = (39 – 30) + 5 =
Запиши задачу кратко и реши её:
У Нюши в шкатулочке 15 бантиков, а заколок на 10 больше. Сколько бантиков и заколок у Нюши в шкатулочке?
Реши уравнения :
+ х = 17
х – 6 = 8
Сравни выражения:
60 + 30 … 72 + 8
50 – 9 … 50 + 9
Начерти прямоугольник со сторонами 3 см и 2 см и найди его периметр.
Вариант 2.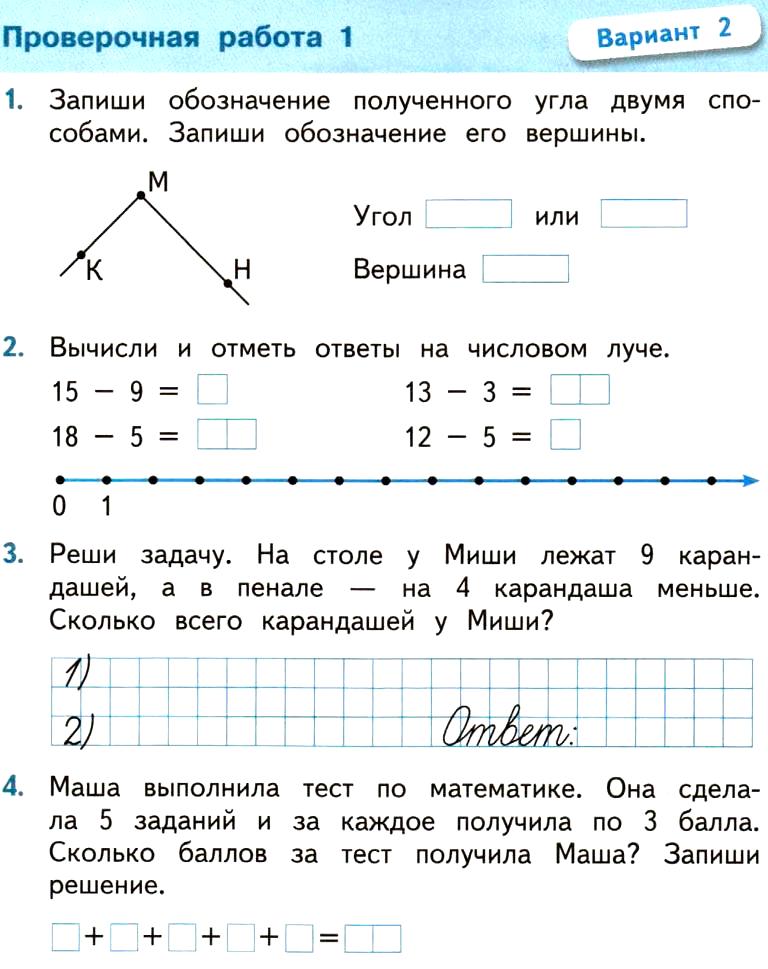
Вычисли.
32 – 8 = 72 – 2 = 39 – 30 =
70 – 24 = 20 – 8 = 35 – 6 =
51 + 20 = 60 – 32 = 80 – (35 – 20) =
Запиши задачу кратко и реши её:
Ваня прочитал 23 толстые книги, а тонких – на 17 больше. Сколько всего книг прочитал Ваня?
Реши уравнения:
6 + х = 13
х – 8 = 14
Сравни выражения:
80 + 10 … 74 + 6
30 – 4 … 30 + 4
Начерти квадрат со стороной 4 см и найди его периметр.
Контрольная работа №6 по теме «Письменные приёмы сложения и вычитания»
Вариант 1.
Реши задачу.
Из гаража уехало 18 грузовых машин, а легковых на 10 меньше. Сколько всего машин уехало из гаража?
Вычисли столбиком:
36 + 24 = 42 + 37 = 55 + 16 =
97 – 46 = 90 – 35 = 77 – 22 =
3. Реши уравнения: х + 15 = 37
Реши уравнения: х + 15 = 37
54 – у = 33
Найди периметр данной фигуры и вырази его в миллиметрах:
4 см
2 см 3 см
3 см
5.Вставь в «окошки» числа так, чтобы записи были верными. 6 дм 3 см = см
50 мм = см
Контрольная работа №6 по теме «Письменные приёмы сложения и вычитания»
Вариант 2.
Реши задачу.
Коля нашёл 10 белых грибов, а сыроежек — на 7 больше. Сколько всего грибов нашёл Коля?
Вычисли столбиком:
90 – 35 = 55 – 32 = 67 – 26 =
34 + 47 = 55 + 45 = 68 + 19 =
3. Реши уравнение: х + 22 = 50
y – 18 = 21
4.Найди периметр данной фигуры и вырази его в миллиметрах:
4 см
1 см
2 см
4 см
5.Вставь в «окошки» числа так, чтобы записи были верными. 5 м 8 дм = дм
60 мм = см
Контрольная работа № 7 по теме «Умножение и деление»
Вариант 1.
Сделай к задаче схематический рисунок и реши её:
Кролик на 3 грядках посадил по 4 кустика рассады. Сколько всего капустной рассады посадил Кролик?
Замени сложение умножением
6 + 6 + 6 + 6 + 6 =
3 + 3 + 3 =
Вычисли столбиком:
53 + 37 = 86 – 35 =
36 + 23 = 80 – 56 =
17 = 88 – 81 =
Реши уравнения:
64 – х = 41 30 + х = 67
Начерти один отрезок длиной 1 дм, а другой на 3 см короче.
Вариант 2.
1. Сделай к задаче схематический рисунок и реши её:
Винни-Пух сочинил 5 пыхтелок, в каждой из которых по 3 строки. Сколько строк сочинил Винни-Пух?
Замени сложение умножением
7 + 7 + 7 + 7 =
2 + 2 + 2 + 2 + 2 + 2 + 2 =
Вычисли столбиком:
26 + 47 = 87 – 25 =
44 + 36 = 70 – 27 =
69 + 17 = 44 – 71 =
4. Реши уравнения:
Реши уравнения:
х + 40 = 62 х + 17 = 33
.Начерти один отрезок длиной 1 дм, а другой на 1 см длиннее.
Вариант 1
Сделай к задаче рисунок и реши её.
В детский сад купили 15 рыбок и поместили в 3 аквариума поровну. Сколько рыбок поместили в каждый аквариум?
Реши примеры:
7 ∙ 2 = 9 ∙ 3 = 27 : 3 =
3 ∙ 6 = 2 ∙ 8 = 16 : 2 =
Реши уравнения:
6 ∙ х = 12 х : 3 = 8
Вычисли значения выражений.
84 – (34 – 5) = 40 – 18 + 5 =
Начерти прямоугольник, у которого ширина
2 см, а длина на 3 см больше. Найди периметр этого прямоугольника.
Вариант 2
1. Сделай к задаче рисунок и реши её.
Бабушка испекла 12 пирожков и разложила на 3 тарелки. По сколько пирожков было на тарелке?
По сколько пирожков было на тарелке?
2. Реши примеры:
3 ∙ 8 = 7 ∙ 3 = 21 : 3 =
9 ∙ 2 = 2 ∙ 6 = 12 : 2 =
3. Реши уравнения:
9 ∙ х = 18 х : 4 = 3
4. Вычисли значения выражений.
93– (78 – 9) = 50 – 26 + 3 =
5.Начерти прямоугольник, у которого ширина
6 см, а длина на 3 см меньше. Найди периметр этого прямоугольника.
Вариант 2
1. Сделай к задаче рисунок и реши её.
Бабушка испекла 12 пирожков и разложила на 3 тарелки. По сколько пирожков было на тарелке?
2. Реши примеры:
3 ∙ 8 = 7 ∙ 3 = 21 : 3 =
9 ∙ 2 = 2 ∙ 6 = 12 : 2 =
3. Реши уравнения:
9 ∙ х = 18 х : 4 = 3
4. Вычисли значения выражений.
93– (78 – 9) = 50 – 26 + 3 =
5.Начерти прямоугольник, у которого ширина
6 см, а длина на 3 см меньше. Найди периметр этого прямоугольника.
Итоговая контрольная работа за 2 класс
Реши задачу:
В школьных соревнованиях приняли участие 27 девочек, а мальчиков на 16 человек больше. Сколько детей участвовало в соревнованиях?
Сколько детей участвовало в соревнованиях?
Вычисли
56 + 37 = 24 : 3 = 3 · 2 + 17=
74 – 39 = 8 · 2 = 35 – (3 ·7) =
89 – 6 = 0 : 7 = 0 + (8 ·2) =
Реши уравнения
37 + х = 60
Сравни:
3 см 5 мм … 36 мм
7дм … 60 см
1 м … 100 см
5 . Сделай рисунок и реши задачу:
Кондитер украсил 3 торта. На каждый торт он положил по 6 вишенок. Сколько вишенок положил кондитер на торты?
Начерти прямоугольник со сторонами 2 см и 3 см. Найди его периметр.
Реши задачу;
В парке растут 34 берёзы, а лип – на 17 больше.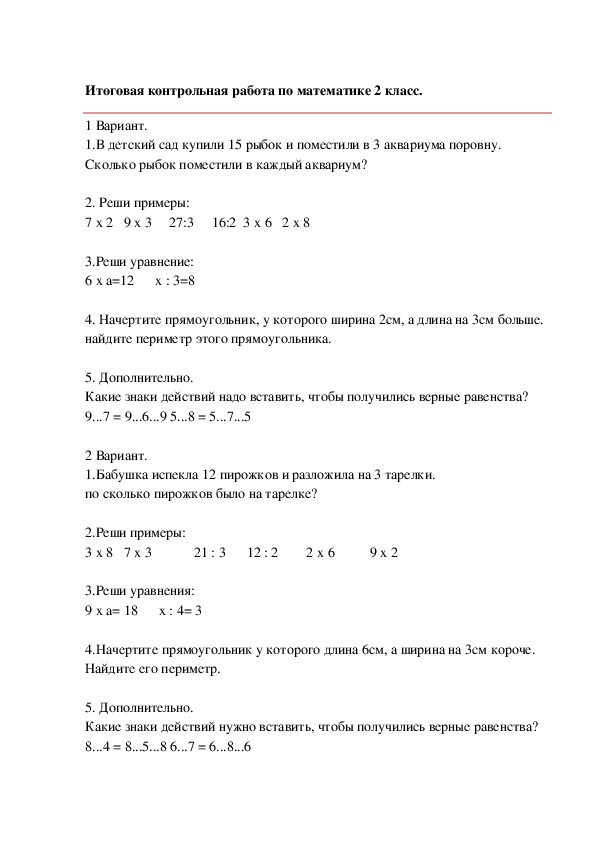 Сколько деревьев растёт в парке?
Сколько деревьев растёт в парке?
Вычисли:
65 – 48 = 18 : 6 = (43 – 40 ) ·4
26 + 48 = 8 · 3 = 5 ·3 + 6 =
50 – 7 = 4 ·0 = 0 : 3 + 15 =
Реши уравнение
Х + 33 = 42
Сравни
10 см … 1 дм
6 см 7 мм … 60 мм
5 дм 6 см … 65 см
Сделай рисунок и реши задачу:
Кондитер украсил 2 торта. На каждый торт он положил по 6 вишенок. Сколько вишенок положил кондитер на торты?
. Начерти прямоугольник со сторонами 2 см и 3 см. Найди его периметр
Контрольные работы по математике за 1 полугодие 2 класс
Контрольные работы по математике за 1 полугодие 2 класс в соответствии с разными УМК.
Цель: проверить уровень математической подготовки, прочности усвоения и осознанности материала учащимися по пройденным темам на конец 1 полугодия.
Контрольная работа за 1 полугодие 2 класс УМК «Школа России»
Вариант 1
1. Реши задачу:
В ёлочной гирлянде 7 красных лампочек, синих на 6 больше, чем красных, а жёлтых – столько, сколько красных и синих вместе. Сколько в гирлянде жёлтых лампочек?
2. Реши примеры:
75 + 20 = 90 – 3 = 45 – 5 + 7 =
80 + 11 = 60 – 20 = 83 – (40 + 30) =
3. Реши уравнение:
5 + х = 12
4. Найди периметр данной фигуры: (предлагаем четырехугольник или треугольник)
5. Вставь в «окошки» числа так, чтобы записи были верными:
6 дм 3 см = см 50 мм = см
6*. Вместо звёздочек вставь знаки «+» или «- «, а в «окошки» запиши числа так, чтобы записи были верными:
[ ] * 8 < 13 – 8 25 + 5 = 37 * [ ]
Вариант 2
1. Реши задачу:
Реши задачу:
На новогоднюю ёлку повесили 11 шаров, сосулек на 4 меньше, чем шаров, а шишек – столько, сколько шаров и сосулек вместе. Сколько шишек повесили на ёлку?
2. Реши примеры:
54 + 30 = 80 – 4 = 34 – 4 + 6 =
70 + 12 = 40 – 10 = 95 – (60 + 20) =
3. Реши уравнение:
х + 7 = 16
4. Найди периметр данной фигуры: (предлагается треугольник или четырехугольник)
5. Вставь в «окошки» числа так, чтобы записи были верными:
5 м 8 дм = [ ] дм 60 мм =[ ] см
6*. Вместо звёздочек вставь знаки «+» или «-«, а в «окошки» запиши числа так, чтобы записи были верными:
11 — 7 < [ ] * 7 68 * [ ] = 57 + 3
Контрольная работа 2 касс 1 полугодие УМК «Перспектива»
1 вариант
1. Реши задачу.
У продавца было 16 сувениров, он продал 5 сувениров, на другой день он получил со склада ещё 8 сувениров. Сколько сувениров стало у продавца?
Сколько сувениров стало у продавца?
2. Сравни выражения
7 ∙2 _ 9 + 6 18 : 2 _ 16 : 2 2дм — 6 см _ 16 см
12 : 2 _ 18 : 3 2 ∙ 6 _ 7 1 дм + 10 см _ 12 см
3. Реши задачу:
Для украшения 6 пирожных кондитер использовал 12 вишен. Сколько вишен положил кондитер на каждое пирожное?
4. Выполни вычисления.
3 · 3 2 · 7 – 6 16 : 4 10 + 5 ∙ 2
4 · 5 2 · 9 + 2 0 ∙ 2 18 – 3 ∙ 4
4 · 3 6 · 3 + 2 12 : 6 15 – 13 + 14
5. Начерти незамкнутую ломаную линию длиной 12 см из четырёх равных звеньев. Найди длину одного звена.
2 вариант
1. Реши задачу.
В бидоне было 14 л молока. Утром взяли 7 л молока, а вечером налили в бидон ещё 6 л. Сколько молока стало в бидоне?
2. Сравни выражения
20 : 5 _ 15 : 3 16 : 8 _ 15 : 5 1дм + 8см _9 см
3 ∙5 _ 5 ∙ 2 7 ∙ 2 _ 18 12 см – 1 дм _ 2 дм
3. Реши задачу:
Реши задачу:
В три коробки поровну разложили 18 карандашей. Сколько карандашей в одной коробке?
4. Выполни вычисления.
3 · 6 2 · 8 – 6 18 : 3 9 + 3 ∙ 2
4 · 4 2 · 9 + 2 0 ∙ 12 16 – 4 ∙ 4
4 · 3 5 · 3 + 2 20 : 4 18 – 11 + 12
5. Начерти незамкнутую ломаную линию длиной 12 см из четырёх равных звеньев. Найди длину одного звена.
Перспективная начальная школа. Контрольная работа по математике за первое полугодие 2 класс
Вариант 1
Фамилия ________________________ __________________
1. ЗАДАЧА: В корзине было 18 фруктов. Из них – 9 яблок, а остальные груши. Сколько груш было в корзине?
РИСУНОК _______________________________________________
РЕШЕНИЕ _______________________________________________
ОТВЕТ _______________________________________________
2. ВЫЧИСЛИ:
46 + 3 35 + 17
38 — 5 48 + 3
50 + 37 44 + 6
83 — 30 50 — 7
3. СРАВНИ:
СРАВНИ:
1 дм 2 см … 12см 96 — 90 … 27 — 20
2 см … 2 дм 53 + 1 … 50 + 4
4. Начерти первый отрезок длиной 8 см, а второй на 3 см больше. Укажи длину каждого отрезка.
.
.
5. ЗАДАЧА: В каждой из трёх ваз лежит по 2 груши. Сколько груш лежит в этих вазах?
РИСУНОК ___________________________________________
РЕШЕНИЕ ___________________________________________
ОТВЕТ ___________________________________________
6. Начерти квадрат со стороной 2 см и квадрат со стороной 4 см. Вычисли и сравни их периметры. Раскрась тот квадрат, чей периметр меньше.
Вариант 2
Фамилия ___________________________ _______________________
1. ЗАДАЧА: У Ани было 15 цветов. Из них- 8 розы, а остальные
ромашки. Сколько у Ани было ромашек?
РИСУНОК _______________________________________________
РЕШЕНИЕ _______________________________________________
ОТВЕТ _______________________________________________
2. ВЫЧИСЛИ:
ВЫЧИСЛИ:
53 + 4 45 + 18
46 — 5 38 + 4
60 + 28 26 + 4
78 — 40 40 — 7
3. СРАВНИ:
1 дм 6 см … 16 см 84 — 80 … 56 — 50
7 см … 7 дм 72 + 1 … 70 + 3
4. Начерти первый отрезок длиной 7 см, а второй на 5 см меньше. Укажи длину каждого отрезка.
.
.
5. ЗАДАЧА: В каждой из четырёх коробок лежит по 2 карандаша. Сколько карандашей лежит в этих коробках?
РИСУНОК _____________________________________________
РЕШЕНИЕ _____________________________________________
ОТВЕТ _____________________________________________
6. Начерти квадрат со стороной 3 см и квадрат со стороной 4 см. Вычисли и сравни их периметры. Раскрась тот квадрат, чей периметр больше.
Контрольная работа для 2 класса — Математика — В помощь учителю — Учительские университеты
Контрольная работа для 2 класса за I четвертьМатематический диктант
1. На сколько 8 больше 5?
На сколько 8 больше 5?
1. Найдите сумму чисел 2 и 4.
2. Первое слагаемое 60, второе слагаемое 20. Найдите сумму чисел.
3. Сумма двух одинаковых слагаемых число 80. Чему равно каждое слагаемое?
4. Какое число на 3 меньше, чем 8?
5. Какое число предшествует числу 88?
6. Последующее число для числа 56?
7. Найдите разность чисел 80 и 30.
8. Уменьшаемое 7, вычитаемое 4. Найдите разность чисел.
9. Какое число меньше 90 на 30?
1. Задача
I вариант
Таня нарисовала 5 бабочек, а Аня на 3 бабочки больше. Сколько бабочек нарисовала Аня?
II вариант
Паша забил в ворота 9 голов, а Дима на 3 гола меньше. Сколько голов забил Дима?
2. Вычислить:
I вариант
90 – 40
61 + 1
30 + 20
89 – 1
3дм 2см = см
56см =дм см
II вариант
80-50
40+30
71+1
84-1
4дм 5см = см
79см = дм см
3. Реши уравнение:
I вариант
а +3 = 9
II вариант
4 + х = 9
4. Реши задачу:
Реши задачу:
I вариант
Длина прямоугольника 3 см, а ширина 1см. Найди периметр прямоугольника.
II вариант
Длина прямоугольника 3 см, а ширина 2 см. Найди периметр прямоугольника.
Творчество:
5. У семерых братьев по одной сестре. Сколько детей в семье?
6. Два сына и два отца съели 3 яйца. Сколько яиц съел каждый?
7. Сколько на чертеже углов?
Контрольная работа для 2 класса за II четверть
1. Задача
I вариант
Осенью Катя засушила 6 кленовых листочков, а дубовых на 7 больше. Сколько всего листочков засушила Катя?
II вариант
Зина купила 7 тетрадей в клетку, а в линию на 4 тетради больше. Сколько Зина купила всего тетрадей?
2. Вычислить в столбик:
I вариант
36+34
48+22
54+23
48-26
56-26
70-34
II вариант
64+26
53+37
43+35
82-62
90-48
67-53
3. Реши уравнение:
I вариант
а +7 = 13
II вариант
8 + х = 15
4. Реши задачу и начерти квадрат:
I вариант
Сторона квадрата 2 см. Найди периметр квадрата.
II вариант
Сторона квадрата 3 см. Найди периметр квадрата. Найди периметр квадрата.
Творчество:
5. Маша ехала в поезде. Она выглянула в окно и заметила, что перед ней 4 вагона, а за ней еще 2. Сколько вагонов в поезде?
6. На лестнице 11 ступенек. Какая ступенька находится посредине?
7. Сколько квадратов на рисунке?
Контрольная работа для 2 класса III четверть
1. Решить задачи:
I вариант
У Антона 9 тетрадей в клетку, что на 5 меньше, чем в линейку. Сколько тетрадей в линейку?
II вариант
В вазе стояло 9 роз, что на 4 меньше, чем гвоздик. Сколько гвоздик стояло в вазе?
2. Решить задачи:
I вариант
Во дворе гуляло 27 кур и 8 петухов. Когда несколько птиц ушло, осталось 19. Сколько птиц ушло?
II вариант
На кормушке было 15 синиц и 8 воробьёв. Когда несколько птиц улетело, их осталось 6. Сколько птиц улетело?
3. Реши примеры в столбик:
I вариант
36+14
48+39
50-37
83-59
II вариант
56+14
58+29
60-38
84-49
4. Реши уравнение:
I вариант
а – 26 = 44
II вариант
а – 36 = 24
5. Переведи:
I вариант
3дм 5см =см
85см = дм см
220 см =м дм
800см = м
II вариант
7дм 5см =см
48см = дм см
320 см =м дм
600см = м
Творчество:
6. У двух братьев вместе 100 марок. Старший брат подарил младшему на его день рождения 20 марок, и у них стало марок поровну. Сколько марок было у каждого брата до этого?
7. Отец и сыновья катались на трех и двухколесных велосипедах. У велосипедов было всего 7 колёс. Сколько сыновей у отца?
8. Сколько треугольников в данной фигуре?
Контрольная работа за 2 класс IV четверть
1.Решить задачи:
I вариант
В упаковке 15 синих, 12 зелёных и 8 красных воздушных шаров. Сколько всего шаров в упаковке?
II вариант
На кормушке сидело 12 синиц, 4 голубя и 8 воробьёв. Сколько всего птиц на кормушке?
2. Реши
I вариант
Длина прямоугольника 6 дм, а ширина 4дм. Чему равен его периметр?
II вариант
Длина прямоугольника 7 дм, а ширина 3 дм. Чему равен его периметр?
3. Реши примеры в столбик:
I вариант
374+123
409+37
605-283
573-140
II вариант
509+247
534+302
602-245
726-302
4. Реши уравнение:
I вариант
а – 250 = 244+125
II вариант
а – 320 = 127+122
5. Переведи:
I вариант
7дм 6см = см
93см = дм см
640 см = м дм
600см = м
II вариант
9дм 5см = см
37см = дм см
460 см = м дм
700см = м
6. Реши удобным способом:
I вариант
(397 +11) +(3 +249)
II вариант
(496 +11) +(4 +209)
Творчество:
7. У двух друзей 70 марок. Когда один мальчик подарил своему другу 20 марок, то у них марок стало поровну. Сколько у них марок было сначала?
8. Сколько треугольников на чертеже?
% PDF-1.4 5 0 obj > endobj 8 0 объект (Предисловие) endobj 9 0 объект > endobj 11 0 объект (СОДЕРЖАНИЕ) endobj 12 0 объект > endobj 15 0 объект (ВВЕДЕНИЕ) endobj 16 0 объект > endobj 19 0 объект (Математическое моделирование роботов) endobj 20 0 объект > endobj 23 0 объект (Символическое представление роботов) endobj 24 0 объект > endobj 27 0 объект (Пространство конфигурации) endobj 28 0 объект > endobj 31 0 объект (Государственное пространство) endobj 32 0 объект > endobj 35 0 объект (Рабочее пространство) endobj 36 0 объект > endobj 39 0 объект (Роботы как механические устройства) endobj 40 0 obj > endobj 43 0 объект (Классификация роботов-манипуляторов) endobj 44 0 объект > endobj 47 0 объект (Робототехнические системы) endobj 48 0 объект > endobj 51 0 объект (Точность и повторяемость) endobj 52 0 объект > endobj 55 0 объект (Запястья и конечные эффекты) endobj 56 0 объект > endobj 59 0 объект (Общие кинематические устройства манипуляторов) endobj 60 0 obj > endobj 63 0 объект (Шарнирно-сочлененный манипулятор \ (RRR \)) endobj 64 0 объект > endobj 67 0 объект (Сферический манипулятор \ (RRP \) \ 040) endobj 68 0 объект > endobj 71 0 объект (Манипулятор SCARA \ (RRP \) \ 040) endobj 72 0 объект > endobj 75 0 объект (Цилиндрический манипулятор \ (RPP \) \ 040) endobj 76 0 объект > endobj 79 0 объект (Декартов манипулятор \ (PPP \) \ 040) endobj 80 0 объект > endobj 83 0 объект (Параллельный манипулятор) endobj 84 0 объект > endobj 87 0 объект (Наброски текста) endobj 88 0 объект > endobj 91 0 объект (Краткое содержание главы ) endobj 92 0 объект > endobj 94 0 объект (Проблемы) endobj 95 0 объект > endobj 98 0 объект (ЖЕСТКИЕ ДВИЖЕНИЯ И ОДНОРОДНЫЕ ПРЕОБРАЗОВАНИЯ) endobj 99 0 объект > endobj 102 0 объект (Представление позиций) endobj 103 0 объект > endobj 106 0 объект (Представление вращения) endobj 107 0 объект > endobj 110 0 объект (Вращение в плоскости) endobj 111 0 объект > endobj 114 0 объект (Вращения в трех измерениях) endobj 115 0 объект > endobj 118 0 объект (Вращательные преобразования) endobj 119 0 объект > endobj 122 0 объект (Преобразования подобия) endobj 123 0 объект > endobj 126 0 объект (Состав вращений) endobj 127 0 объект > endobj 130 0 объект (Поворот относительно текущего кадра) endobj 131 0 объект > endobj 134 0 объект (Вращение относительно неподвижной рамы) endobj 135 0 объект > endobj 138 0 объект (Параметризация вращений) endobj 139 0 объект > endobj 142 0 объект (Углы Эйлера) endobj 143 0 объект > endobj 146 0 объект (Углы крена, тангажа, рыскания \ 040) endobj 147 0 объект > endobj 150 0 объект (Представление оси / угла) endobj 151 0 объект > endobj 154 0 объект (Жесткие движения) endobj 155 0 объект > endobj 158 0 объект (Однородные преобразования) endobj 159 0 объект > endobj 162 0 объект (Краткое содержание главы ) endobj 163 0 объект > endobj 166 0 объект (ПРЯМАЯ И ОБРАТНАЯ КИНЕМАТИКА) endobj 167 0 объект > endobj 170 0 объект (Кинематические цепи) endobj 171 0 объект > endobj 174 0 объект (Прямая кинематика: Конвенция Денавита-Хартенберга) endobj 175 0 объект > endobj 178 0 объект (Проблемы существования и уникальности) endobj 179 0 объект > endobj 182 0 объект (Назначение координатных рамок) endobj 183 0 объект > endobj 186 0 объект (Примеры ) endobj 187 0 объект > endobj 190 0 объект (Обратная кинематика) endobj 191 0 объект > endobj 194 0 объект (Общая задача обратной кинематики) endobj 195 0 объект > endobj 198 0 объект (Кинематическая развязка) endobj 199 0 объект > endobj 202 0 объект (Обратное положение: геометрический подход) endobj 203 0 объект > endobj 206 0 объект (Обратная ориентация) endobj 207 0 объект > endobj 210 0 объект (Примеры ) endobj 211 0 объект > endobj 214 0 объект (Краткое содержание главы ) endobj 215 0 объект > endobj 218 0 объект (Примечания и ссылки) endobj 219 0 объект > endobj 221 0 объект (Проблемы) endobj 222 0 объект > endobj 225 0 объект (КИНЕМАТИКА СКОРОСТИ — МАНИПУЛЯТОР ЯКОБИАН) endobj 226 0 объект > endobj 229 0 объект (Угловая скорость: случай с фиксированной осью) endobj 230 0 объект > endobj 233 0 объект (Кососимметричные матрицы) endobj 234 0 объект > endobj 237 0 объект (Свойства кососимметричных матриц) endobj 238 0 объект > endobj 241 0 объект (Производная матрицы вращения) endobj 242 0 объект > endobj 245 0 объект (Угловая скорость: общий случай) endobj 246 0 объект > endobj 249 0 объект (Добавление угловых скоростей) endobj 250 0 объект > endobj 253 0 объект (Линейная скорость точки, прикрепленной к движущейся рамке) endobj 254 0 объект > endobj 257 0 объект (Вывод якобиана) endobj 258 0 объект > endobj 261 0 объект (Угловая скорость ) endobj 262 0 объект > endobj 265 0 объект (Линейная скорость) endobj 266 0 объект > endobj 269 0 объект (Объединение углового и линейного якобианов) endobj 270 0 объект > endobj 273 0 объект (Примеры ) endobj 274 0 объект > endobj 277 0 объект (Аналитический якобиан) endobj 278 0 объект > endobj 281 0 объект (Особенности) endobj 282 0 объект > endobj 285 0 объект (Разделение сингулярностей) endobj 286 0 объект > endobj 289 0 объект (Особенности запястья) endobj 290 0 объект > endobj 293 0 объект (Особенности руки) endobj 294 0 объект > endobj 297 0 объект (Обратные скорость и ускорение) endobj 298 0 объект > endobj 301 0 объект (Управляемость) endobj 302 0 объект > endobj 305 0 объект (Краткое содержание главы ) endobj 306 0 объект > endobj 309 0 объект (Проблемы) endobj 310 0 объект > endobj 313 0 объект (ПУТЬ И ПЛАНИРОВАНИЕ ТРАЕКТОРА) endobj 314 0 объект > endobj 317 0 объект (Пространство конфигурации) endobj 318 0 объект > endobj 321 0 объект (Планирование пути с использованием потенциальных полей пространства конфигурации) endobj 322 0 объект > endobj 325 0 объект (Привлекательное поле) endobj 326 0 объект > endobj 329 0 объект (Отталкивающее поле) endobj 330 0 объект > endobj 333 0 объект (Планирование градиентного спуска) endobj 334 0 объект > endobj 337 0 объект (Планирование с использованием потенциальных полей рабочего пространства) endobj 338 0 объект > endobj 341 0 объект (Определение потенциальных полей рабочего пространства) endobj 342 0 объект > endobj 345 0 объект (Сопоставление сил рабочего пространства с совместными силами и моментами) endobj 346 0 объект > endobj 349 0 объект (Алгоритм планирования движения) endobj 350 0 объект > endobj 353 0 объект (Использование случайных движений для выхода из локальных минимумов) endobj 354 0 объект > endobj 357 0 объект (Вероятностные методы дорожной карты) endobj 358 0 объект > endobj 361 0 объект (Выборка конфигурационного пространства) endobj 362 0 объект > endobj 365 0 объект (Соединение пар конфигураций) endobj 366 0 объект > endobj 369 0 объект (Улучшение) endobj 370 0 объект > endobj 373 0 объект (Сглаживание пути) endobj 374 0 объект > endobj 377 0 объект (планирование траектории) endobj 378 0 объект > endobj 381 0 объект (Траектории движения от точки к точке) endobj 382 0 объект > endobj 385 0 объект (Траектории для путей, заданных промежуточными точками) endobj 386 0 объект > endobj 389 0 объект (Историческая перспектива ) endobj 390 0 объект > endobj 392 0 объект (Проблемы) endobj 393 0 объект > endobj 396 0 объект (ДИНАМИКА) endobj 397 0 объект > endobj 400 0 obj (Уравнения Эйлера-Лагранжа) endobj 401 0 объект > endobj 404 0 объект (Одномерная система) endobj 405 0 объект > endobj 408 0 объект (Общий случай) endobj 409 0 объект > endobj 412 0 объект (Общие выражения для кинетической и потенциальной энергии) endobj 413 0 объект > endobj 416 0 объект (Тензор инерции) endobj 417 0 объект > endobj 420 0 объект (Кинетическая энергия для робота n-Link) endobj 421 0 объект > endobj 424 0 объект (Потенциальная энергия для робота n-Link) endobj 425 0 объект > endobj 428 0 объект (Уравнения движения) endobj 429 0 объект > endobj 432 0 объект (Некоторые общие конфигурации) endobj 433 0 объект > endobj 436 0 объект (Свойства уравнений динамики роботов) endobj 437 0 объект > endobj 440 0 объект (Косая симметрия и свойства пассивности) endobj 441 0 объект > endobj 444 0 объект (Границы матрицы инерции) endobj 445 0 объект > endobj 448 0 объект (Линейность в параметрах) endobj 449 0 объект > endobj 452 0 объект (Формулировка Ньютона-Эйлера) endobj 453 0 объект > endobj 456 0 объект (Возвращение к плоскому манипулятору локтя) endobj 457 0 объект > endobj 460 0 объект (Проблемы) endobj 461 0 объект > endobj 464 0 объект (НЕЗАВИСИМЫЙ СОВМЕСТНЫЙ КОНТРОЛЬ) endobj 465 0 объект > endobj 468 0 объект (Введение ) endobj 469 0 объект > endobj 472 0 объект (Динамика привода) endobj 473 0 объект > endobj 476 0 объект (Отслеживание уставки) endobj 477 0 объект > endobj 480 0 объект (Компенсатор ЧР) endobj 481 0 объект > endobj 484 0 объект (Характеристики компенсаторов частичных разрядов) endobj 485 0 объект > endobj 488 0 объект (Компенсатор ПИД) endobj 489 0 объект > endobj 492 0 объект (Насыщенность) endobj 493 0 объект > endobj 496 0 объект (Управление с прогнозированием и вычисленный крутящий момент) endobj 497 0 объект > endobj 500 0 объект (Динамика трансмиссии) endobj 501 0 объект > endobj 504 0 объект (Государственный космический дизайн) endobj 505 0 объект > endobj 508 0 объект (Компенсатор обратной связи состояния) endobj 509 0 объект > endobj 512 0 объект (Наблюдатели) endobj 513 0 объект > endobj 516 0 объект (Проблемы) endobj 517 0 объект > endobj 520 0 объект (МНОГООБРАЗНОЕ УПРАВЛЕНИЕ) endobj 521 0 объект > endobj 524 0 объект (Введение ) endobj 525 0 объект > endobj 528 0 объект (Возвращение к PD-контролю) endobj 529 0 объект > endobj 532 0 объект (Обратная динамика) endobj 533 0 объект > endobj 536 0 объект (Обратная динамика пространства задач) endobj 537 0 объект > endobj 540 0 объект (Надежное и адаптивное управление движением) endobj 541 0 объект > endobj 544 0 объект (Устойчивая линеаризация обратной связи) endobj 545 0 объект > endobj 548 0 объект (Надежное управление на основе пассивности) endobj 549 0 объект > endobj 552 0 объект (Адаптивное управление на основе пассивности) endobj 553 0 объект > endobj 556 0 объект (Проблемы) endobj 557 0 объект > endobj 560 0 объект (СИЛОВОЙ КОНТРОЛЬ) endobj 561 0 объект > endobj 564 0 объект (Введение ) endobj 565 0 объект > endobj 568 0 объект (Рамки координат и ограничения) endobj 569 0 объект > endobj 572 0 объект (Естественные и искусственные ограничения) endobj 573 0 объект > endobj 576 0 объект (Сетевые модели и импеданс) endobj 577 0 объект > endobj 580 0 объект (Операторы импеданса) endobj 581 0 объект > endobj 584 0 объект (Классификация операторов импеданса) endobj 585 0 объект > endobj 588 0 объект (Th \ 351venin и эквиваленты Norton) endobj 589 0 объект > endobj 592 0 объект (Динамика и контроль пространства задач) endobj 593 0 объект > endobj 596 0 объект (Взаимосвязь статической силы и крутящего момента) endobj 597 0 объект > endobj 600 0 объект (Динамика пространства задач) endobj 601 0 объект > endobj 604 0 объект (Контроль импеданса) endobj 605 0 объект > endobj 608 0 объект (Гибридный контроль импеданса) endobj 609 0 объект > endobj 612 0 объект (Проблемы) endobj 613 0 объект > endobj 616 0 объект (ГЕОМЕТРИЧЕСКОЕ НЕЛИНЕЙНОЕ УПРАВЛЕНИЕ) endobj 617 0 объект > endobj 620 0 объект (Введение ) endobj 621 0 объект > endobj 624 0 объект (Задний план ) endobj 625 0 объект > endobj 628 0 объект (Теорема Фробениуса) endobj 629 0 объект > endobj 632 0 объект (Линеаризация обратной связи) endobj 633 0 объект > endobj 636 0 объект (Системы с одним входом) endobj 637 0 объект > endobj 640 0 объект (Линеаризация обратной связи для роботов n-Link) endobj 641 0 объект > endobj 644 0 объект (Неголономные системы) endobj 645 0 объект > endobj 648 0 объект (Инволютивность и голономия) endobj 649 0 объект > endobj 652 0 объект (Системы управления без дрейфа) endobj 653 0 объект > endobj 656 0 объект (Примеры неголономных систем) endobj 657 0 объект > endobj 660 0 объект (Теорема Чоу и управляемость бездрейфующих систем) endobj 661 0 объект > endobj 664 0 объект (Проблемы) endobj 665 0 объект > endobj 668 0 объект (КОМПЬЮТЕРНОЕ ЗРЕНИЕ) endobj 669 0 объект > endobj 672 0 объект (Геометрия формирования изображения) endobj 673 0 объект > endobj 676 0 объект (Рамка координат камеры) endobj 677 0 объект > endobj 680 0 объект (Перспективная проекция) endobj 681 0 объект > endobj 684 0 объект (Плоскость изображения и матрица датчиков) endobj 685 0 объект > endobj 688 0 объект (Калибровка камеры) endobj 689 0 объект > endobj 692 0 объект (Внешние параметры камеры) endobj 693 0 объект > endobj 696 0 объект (Внутренние параметры камеры) endobj 697 0 объект > endobj 700 0 объект (Определение параметров камеры) endobj 701 0 объект > endobj 704 0 объект (Сегментация по порогу) endobj 705 0 объект > endobj 708 0 объект (Краткий статистический обзор) endobj 709 0 объект > endobj 712 0 объект (Автоматический выбор порога) endobj 713 0 объект > endobj 716 0 объект (Подключенные компоненты) endobj 717 0 объект > endobj 720 0 объект (Положение и ориентация) endobj 721 0 объект > endobj 724 0 объект (Моменты) endobj 725 0 объект > endobj 728 0 объект (Центроид объекта) endobj 729 0 объект > endobj 732 0 объект (Ориентация объекта) endobj 733 0 объект > endobj 736 0 объект (Проблемы) endobj 737 0 объект > endobj 740 0 объект (КОНТРОЛЬ НА ОСНОВЕ ВИДЕНИЯ) endobj 741 0 объект > endobj 744 0 объект (Подходы к управлению на основе зрения) endobj 745 0 объект > endobj 748 0 объект (Куда поставить камеру) endobj 749 0 объект > endobj 752 0 объект (Как использовать данные изображения) endobj 753 0 объект > endobj 756 0 объект (Матрица движения и взаимодействия камеры) endobj 757 0 объект > endobj 760 0 объект (Матрица взаимодействия vs.Изображение якобиана) endobj 761 0 объект > endobj 764 0 объект (Матрица взаимодействия для точек) endobj 765 0 объект > endobj 768 0 объект (Скорость неподвижной точки относительно движущейся камеры) endobj 769 0 объект > endobj 772 0 объект (Построение матрицы взаимодействия) endobj 773 0 объект > endobj 776 0 объект (Свойства матрицы взаимодействия точек) endobj 777 0 объект > endobj 780 0 объект (Матрица взаимодействия для нескольких точек) endobj 781 0 объект > endobj 784 0 объект (Законы управления на основе изображений) endobj 785 0 объект > endobj 788 0 объект (Вычисление движения камеры) endobj 789 0 объект > endobj 792 0 объект (Схемы пропорционального регулирования) endobj 793 0 объект > endobj 796 0 объект (Взаимосвязь между конечным эффектором и движениями камеры) endobj 797 0 объект > endobj 800 0 объект (Разделенные подходы) endobj 801 0 объект > endobj 804 0 объект (Восприимчивость к движению) endobj 805 0 объект > endobj 808 0 объект (Краткое содержание главы ) endobj 809 0 объект > endobj 811 0 объект (Проблемы) endobj 812 0 объект > endobj 815 0 объект (Приложение A \ 040 Геометрия и тригонометрия) endobj 816 0 объект > endobj 819 0 объект (Тригонометрия) endobj 820 0 объект > endobj 823 0 объект (Атан2) endobj 824 0 объект > endobj 827 0 объект (Формулы приведения) endobj 828 0 объект > endobj 831 0 объект (Двойной угол идентичности) endobj 832 0 объект > endobj 835 0 объект (Закон косинусов) endobj 836 0 объект > endobj 839 0 объект (Приложение B \ 040 Линейная алгебра) endobj 840 0 объект > endobj 843 0 объект (Дифференциация векторов) endobj 844 0 объект > endobj 847 0 объект (Линейная независимость) endobj 848 0 объект > endobj 851 0 объект (Смена координат) endobj 852 0 объект > endobj 855 0 объект (Собственные значения и собственные векторы) endobj 856 0 объект > endobj 859 0 объект (Разложение по сингулярным числам \ (SVD \)) endobj 860 0 объект > endobj 863 0 объект (Приложение C Устойчивость по Ляпунову) endobj 864 0 объект > endobj 867 0 объект (Квадратичные формы и функции Ляпунова \ 040) endobj 868 0 объект > endobj 871 0 объект (Устойчивость по Ляпунову \ 040) endobj 872 0 объект > endobj 875 0 объект (Устойчивость по Ляпунову для линейных систем \ 040) endobj 876 0 объект > endobj 879 0 объект (Теорема ЛаСалля \ 040) endobj 880 0 объект > endobj 883 0 объект (Приложение D Теория пространства состояний динамических систем) endobj 884 0 объект > endobj 887 0 объект (Представление линейных систем в пространстве состояний \ 040) endobj 888 0 объект > endobj 891 0 объект () endobj 892 0 объект > endobj 895 0 объект () endobj 896 0 объект > endobj 899 0 obj> поток x ڍ RMO0WifJUжh5ZЄ4ZHVIV ό * E7 ? `9gJxeu? 0x’J Ն I’yX ^ Hɤ9VpQ =
Анализ двухсуставной планарной руки робота
Теперь я собираюсь добавить второй сустав к роботу, который я показывал вам ранее, и этот робот немного интересен тем, что конечный эффектор может достигать любой конкретной точки в пределах внешнего максимального круга, описанного этим, например такая легко адаптируемая позиция, такая как адаптивная позиция.Мой робот с двумя степенями свободы может адаптировать любую координату x-y в пределах максимального круга.
С этим роботом с двумя степенями свободы, хотя мы можем адаптировать любую координату x-y в пределах его рабочего пространства, он не может адаптировать произвольную ориентацию. Таким образом, если робот хочет быть в этой конкретной координате xy, другой ориентации этого звена робота нет, потому что ориентация и положение сильно связаны.
Давайте проделаем аналогичную процедуру, чтобы определить позу конечного эффектора этого двухзвенного робота.Я собираюсь записать робота и указать длину двух его звеньев и указать два угла сочленения. Далее мы собираемся повернуть кадр координат скважины на величину Q1. Таким образом, мировая система координат теперь становится серой системой координат, показанной здесь. Затем я переведу эту систему координат вместе с первой связью робота, так что теперь она здесь. Теперь мы применили преобразование в направлении x на расстояние A1. Теперь я собираюсь повернуть рамку на величину Q2, теперь рамка координат выглядит так.
Наконец, я переведу его в направлении x на величину A2. Это дает нам систему координат, прикрепленную к конечному исполнительному элементу робота, позу конечного исполнительного элемента.
Теперь я могу расширить это выражение и перемножить каждую из этих матриц, и результат будет следующим. Еще раз, мы можем посмотреть на поступательный путь этой однородной матрицы преобразования. Эти элементы здесь выдвигаются, и теперь у меня есть выражение для координат x и y конечного эффектора моего двухзвенного робота.Еще раз мы можем видеть, что путь вращения этой матрицы преобразования, который указывает ориентацию концевого эффектора, также является функцией Q1 и Q2. Фактически это функция Q1 + Q2. Итак, еще раз, мы можем использовать Q1 и Q2 для независимого управления x и y, но мы не можем независимо контролировать ориентацию конечного эффектора. Если мы используем Q1 и Q2 для выбора x и y, то ориентация конечного эффектора уже определена и может быть выбрана независимо.
Интересная особенность двухзвенного манипулятора заключается в том, что есть две конфигурации углов сочленения, которые устанавливают концевой эффектор в желаемое положение.Вот одна конфигурация робота, а вот альтернативная конфигурация робота, которая приводит к тому же положению конечного эффектора.
Для двухзвенного робота я уже создал несколько рабочих переменных для представления длин звеньев, это переменные A1 и A2, а также для представления двух углов соединения Q1 и Q2. И здесь вы можете увидеть их числовые значения. Чтобы определить позу конечного эффектора, мне нужно связать вместе ряд элементарных однородных преобразований, поэтому я собираюсь выполнить вращение на Q1 с последующим перемещением и направлением x на A1 с последующим вращением Q2 с последующим перемещением по оси x направление по длине звена 2.
И я собираюсь проанализировать два суставных угла, Q1 и Q2. Здесь у нас есть однородное преобразование, представляющее позу концевого эффектора двухзвенного робота, и положение концевого эффектора здесь задается этими двумя числами, и эта матрица 2X2 здесь представляет ориентацию концевого эффектора.
Теперь мы можем заменить эти числовые значения символами, поэтому я определил символы Q1 и Q2 и символы для A1 и A2. Теперь мы можем видеть в рабочем пространстве, что эти вещи являются символическими объектами, что касается MATLAB.И я могу повторить эту функцию trchain2, и теперь у меня есть символическое представление позы этого двухзвенного робота-манипулятора.
Я могу импортировать модель двухзвенного манипулятора в качестве инструментария функции mdl_planar2 и создать в работе новый объект под названием P2, который представляет этот робот-манипулятор.
Что я могу сделать, так это снова вызвать метод обучения, и здесь мы видим двухзвенного робота-манипулятора, и я могу отрегулировать углы его сочленений и посмотреть, как он движется.Здесь у нас есть координаты x и y концевого эффектора робота, и мы видим, что они обновляются по мере того, как я регулирую углы суставов.
Интересная особенность двухзвенного манипулятора состоит в том, что есть два набора углов сочленения, которые приводят к одинаковому положению конечного эффектора. Я собираюсь использовать метод построения графика и переместить робота в конфигурацию, в которой первый сустав имеет нулевой угол, а сустав 2 имеет угол пи в два радиана.
И вот мы видим робота именно в этой конфигурации.Теперь я собираюсь изобразить его в другой конфигурации, этот угол будет равен пи на два, а этот угол будет минус пи на два.
Мы видим, что конечный эффектор робота занимает точно такое же положение. У робота другая конфигурация, конечный эффектор имеет другую ориентацию, но положение точно такое же.
Банк вопросов по математике 2 класса
Переключить навигацию 00
- Железные дороги
- UPSC
- Банковское дело
- SSC
- CLAT
- JEE Main и Advanced
- NEET
- NTSE
- KVPY
- Обучение
- Оборона
- 12-й класс
- 11-й класс
- 10-й класс
- 9-й класс
- 8-й класс
- 7-й класс
- 6-й класс
- 5-й класс
- 4 класс
- 3-й класс
- 2-й класс
- 1-й класс
- Другой экзамен
- Дошкольное образование
- Государственный экзамен депутата
- Государственные экзамены UP
- Государственные экзамены Раджастана
- Государственные экзамены Джаркханда
- Государственные экзамены Чхаттисгарх
- Государственные экзамены Бихара
- Экзамены штата Харьяна
- Государственные экзамены Гуджарата
- Государственные экзамены MH
- Государственные экзамены штата Химачал
- Государственные экзамены Дели
- Государственные экзамены Уттаракханда
- Государственные экзамены Пенджаба
- Государственные экзамены J&K
- Видео
- Учебные пакеты
- Серия испытаний
- Решения Ncert
- Образцы статей
- Банк вопросов
- Ноты
- Решенные статьи
- Текущие дела
Поиск…..
Идти!- Все
- Видео
- Учебные пакеты
- Решения NCERT
- Вопросов
Классы | MIT математики
| Тема | Название | Инструктор (и) | Время | Место |
|---|---|---|---|---|
| 18.01 | Исчисление | TBD | TR 11, F2 | он-лайн |
| 18,02 | Исчисление | Миникоцци, Уильям | TR 11, F 2 | гибрид |
| 18.02A | Исчисление | Миникоцци, Уильям | TR 11, F 2 | гибрид |
| 18,03 | Дифференциальные уравнения | Лори, Эндрю | МВт 1, F 12 | он-лайн с некоторыми выступлениями при личной встрече |
| 18.032 | Дифференциальные уравнения | Озух-Мерсеман, Тристан | МВт 1, F 12 | гибрид |
| 18,04 | Комплексные переменные с приложениями | Ван, Илинь | MWF 2 | гибрид |
| 18.05 | Введение в вероятность и статистику | Орлофф, Джереми | TR 2: 30-4, F 3 | он-лайн |
| 18,06 | Линейная алгебра | Негуц Андрей | MWF 11 | он-лайн с некоторыми выступлениями при личной встрече |
| 18.062J | Математика для компьютерных наук | Курс 6, EECS | TR 2: 30-4 | он-лайн |
| 18.065 / 0651 | Матричные методы в анализе данных, обработке сигналов и машинном обучении | Стрэнг, Гилберт | MWF 1 | гибрид |
| 18.075/0751 | Методы для ученых и инженеров | Ченг, Хунг | MWF 1 | он-лайн |
| 18.085 / 0851 | Вычислительные науки и инженерия I | Лу, Лу | TR 1-2: 30 | он-лайн |
| 18.100A / 1001 | Реальный анализ | Юй, Сюэин | MWF 1 | он-лайн |
| 18.100B / 1002 | Реальный анализ | Хунг, Пей-Кен | TR 9: 30-11 | он-лайн |
| 18.100П | Реальный анализ | Лэндон, Бенджамин | МВт 11-12: 30 | он-лайн |
| 18.102 / 1021 | Введение в функциональный анализ | Родригес, Кейси | TR 1-2: 30 | он-лайн |
| 18.104 | Семинар по анализу | Staffilani, Gigliola | MWF 2 | гибрид |
| 18,125 | Теория измерений и анализ | Даниэль Строок | MWF 1 | он-лайн |
| 18.152/1521 | Введение в уравнения с частными производными | Джерисон, Дэвид | TR 1-2: 30 | он-лайн |
| 18,156 | Дифференциальный анализ II | Гут, Ларри | TR 2: 30-4 | он-лайн |
| 18.157 | Введение в микролокальный анализ | Хинц, Питер | WF 2: 30-4 | он-лайн |
| 18,158 | Разделы дифференциальных уравнений | Мелроуз, Ричард | TR 11-12: 30 | гибрид |
| 18.200 | Принципы дискретной прикладной математики | Cifuentes Pardo, Diego, Goemans, Michel | MWF 10 | он-лайн с некоторыми выступлениями при личной встрече |
| 18.204 | Семинар по дискретной математике для студентов | Дхара, Сувик | МВт 1-2: 30 | он-лайн |
| 18.204 | Семинар по дискретной математике для студентов | Гаудио, Джулия | МВт 9: 30-11 | он-лайн |
| 18,212 | Алгебраическая комбинаторика | Постников Александр |
PPT — RoboTalk: общая структура управления роботом Можем ли мы получить доступ к R2D2 и C3PO с помощью тех же команд управления? Презентация PowerPoint
RoboTalk: общая структура управления роботом Можно ли получить доступ к R2D2 и C3PO с помощью тех же команд управления? Аллен Ян Ян из Университета Иллинойса в Урбана-Шампейн Х.Гонсалес-Банос, В. Нг-Тоу-Хинг, Исследовательский институт Дж. Э. Дэвиса Хонда, Маунтин-Вью, Калифорния,
Мобильный робот с наклонно-поворотной камерой Honda Asimo Humanoid Robot Copyright Lucasfilm Ltd. Мотивация
Почему нам нужна спецификация движения? • Трудности для исследователей в области робототехники: • Промышленное авторское право • Программы нельзя повторно использовать в разных семьях роботов, даже в разных версиях одних и тех же семейств роботов • Придется выбирать ОС на основе предоставленных драйверов • Нелегко делиться роботом удаленно с другими сотрудники в разных местах Команды движения Windows? Linux? Mac OS? Встроенная ОС?
Цели проекта • Что угодно: (кросс-модель) • Обеспечить сетевой интерфейс для Asimo, который не зависит от библиотек контроллеров • Доступ к другим роботам и симуляторам: Pioneer, Puma • Кто угодно: (кросс-платформенный ) • Пользовательский интерфейс должен быть кроссплатформенным: поддерживать Unix, Linux, Mac OS X и Windows.• Где угодно: (межсетевое) • Хорошее качество обслуживания в Интернете.
Демонстрационные видео
Вклад • Стандарт спецификации робота • Единый командный интерфейс • Четыре командных режима между клиентом и сервером: • Прямая • Задержка • Воспроизведение • Широковещательная передача • Простая в изменении реализация драйвера робота на стороне сервера
Предыдущие работы • Игрок [R. Герки и А. Ховард, 2003] • Платформа гуманоидной робототехники с открытой архитектурой (HRP) [F.Kanehiro, et al., 2004] • Open Pino Project [F. Ямасаки и др., 2000] • OROCOS [http://www.orocos.org/] • Выделенные системы • ARIA [robots.activmedia.com/ARIA/] • Робонавт [Х. Олдридж и др., 2000] • Афина [Дж. Biesiadecki, et al., 2001]
Почему не другие? • Не поддерживает гуманоидных роботов • Трудно изменить реализацию драйвера • Нет поддержки качества сети • Нет механизма защиты для экзотических роботов
Архитектура системы • Обзор системы • Структура клиент / сервер • Четыре режима связи
Спецификация конфигурации Спецификация команды Спецификация связи Архитектура — Спецификация Стандартная абстракция
Спецификация конфигурации Спецификация команды Архитектура спецификации связи — Обзор системы Библиотека Asimo Pioneer Library Client.. . Серверный клиент / клиент-симулятор сервера
Архитектура — Сервер Robotalk Server Демон сервера Обеспечивает: буферизацию, планирование, панику и т. Д. Чтение и запись сокетов TCP / IP CClientConnection. . . Проблема CClientConnection Драйвер робота вызывает класс Интерфейс Демон робота CRobotDriver
Архитектура — CClientConnection Серверный демон CClientConnection Команды ввода Демон робота Очередь команд Чтение Очередь воспроизведения Обратная связь Запись Возвратная очередь Очереди приоритетов
Архитектура — Режимы связи • Прямой режим: блокирующий и мгновенный, для отладки • Режим задержки: неблокирующий, мгновенный или с задержкой • Режим воспроизведения : неблокирующее, адаптивное кэширование в зависимости от качества канала • Режим широковещательной рассылки: периодическая обратная связь с запросом
Клиент Синхронизация сервера системные часы Часы Вызов функции Клиент Команда Кэш Робот Демон return Cache Return Cache Прямой режим
Клиент Server Sync системные часы + Clock Delay Вызов функции Client Command Cache Robot Daemon возвращает сигнал ошибки Cache Return Cache Delay Mode
Длина последовательности Command Cache Robot Daemon Client Server Clock Delay Function call Client Playback Cache return error signal Cache Return Cache Playback Режим
Задержка Широковещательный вызов Клиентская команда Кэш Робот Демон возвращает данные Кэш Возврат Кэш Режим широковещательной рассылки
Выводы • Мотивации • Структура системы • Четыре режима сетевых команд • Будущие расширения • Исключительный контроль • Каналы данных • Управление несколькими роботами-гуманоидами • Виртуальные гуманоидные роботы
Виртуальный гуманоид Сайт библиотеки Pioneer A Библиотека камеры Сайт B Сервер Библиотека Puma Виртуальный гуманоид
Спасибо! Аллен Ян: yangyang @ uiuc.